
 Hangar de la P.A.F
Hangar de la P.A.F Wiki
WikiRobinDR-400 jsbSim 120cv
Page 21 sur 33 •  1 ... 12 ... 20, 21, 22 ... 27 ... 33
1 ... 12 ... 20, 21, 22 ... 27 ... 33
Re: RobinDR-400 jsbSim 120cv
Alexis Sam 14 Avr 2012 - 13:18
PS : le pilote avance

Alexis- Admin
- Messages : 2067
Date d'inscription : 19/02/2009
Age : 31
Localisation : Loire Atlantique -

Re: RobinDR-400 jsbSim 120cv
F-JJTH Mar 17 Avr 2012 - 14:01
J'ai fais du nettoyage dans le DR400 et plusieurs test d'optimisations. Tout d'abord, pour la première fois, le DR400 a perdu du poids !! (jusque maintenant il ne faisant qu'en prendre) Avec mon nettoyage je passe de 34.9Mo à 33.0Mo c'est pas grand chose mais c'est déjà ça.
Il reste toujours ce fichier "sauvegarde_dr400.ac" > en avons-nous toujours besoin ? Il pèse 1.4Mo... si il n'est plus utile il faut le supprimer.
J'ai supprimé tous les MATERIALS en double (DefaultWhite.001 / 002 / 003 ...) de tous les fichiers AC sauf celui de details.ac et dr400.ac car je sais que Ernest travail dessus.
Ensuite j'ai fais des test car je me retrouve avec 26fps avec le DR400 ce qui n'est pas énorme.
- Le DR400 lancé normalement = 26 fps
- Le DR400 lancé sans les instruments (donc uniquement la planche de bord troué) = 42fps
- Le DR400 lancé sans la planche de bord (donc sans instruments) = 44fps
- Le DR400 lancé sans intérieur (pas de siège, pas d'instruments...) = 44fps
- Le DR400 lancé sans 3D (pas d'intérieur, pas d'extérieur, pas un troquet, pas une mobilette) = 51fps
Tous ces test on été fait en activant les détails (boulons, écrous... sauf pour le dernier test puisque je n'ai rien chargé). À chaque fois je ma méthode était simple : je lance le DR400, je ne touche pas à la vue, j'attends quelques secondes que les fps se stabilise et je prend la valeur du fps autour duquel ça tourne.
On peut donc dire qu'en vu "intérieur pilote" ce sont les instruments qui bouffent le plus de fps. Il faut donc concentrer nos efforts sur l'optimisation des instruments.
J'ai déjà ouvert tous les instruments et fait un "remove double" sur tous les instruments.
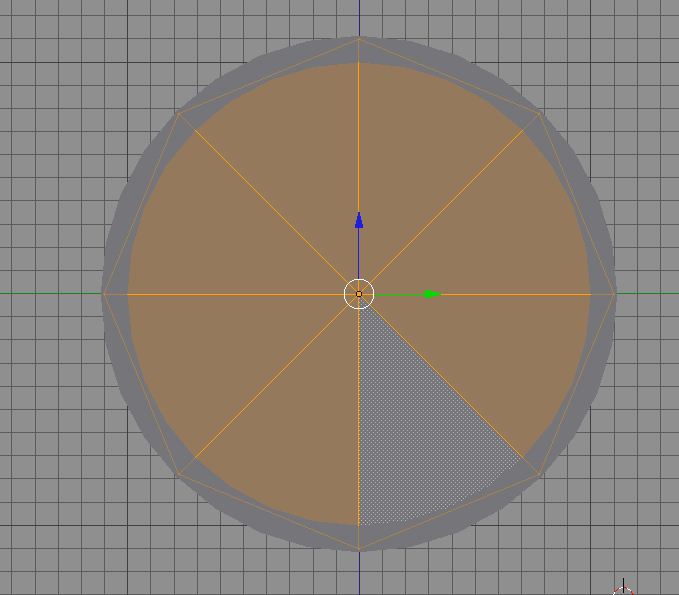
Il semble qu'il existe 2 techniques assez différente :


Sur la première technique on voit clairement au le nombre de facettes et de vertices et beaucoup moins important.
Technique 1 = 7 facettes (16 vertices)
Technique 2 = 32 facettes (33 vertices)
Je constate aussi que quelques textures d'instruments sont en 512x512 tandis que la majorité des instruments sont en 256x256. Je vais donc faire des recherche du côté des textures : est-ce qu'une texture 256x256 est moins gourmande qu'une 512x512 ? cela est-il significatif ?
C'est tout pour le moment !
@Ernest : quoi de neuf concernant l'optimisation des détails ?
Amicalement,
Clément

F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
F-JJTH Mar 17 Avr 2012 - 14:34
alt.png : 512x512 , 161.3Ko ==> 256x256 , 52.6Ko (soit une reduction de poids X3, en zoomant la qualité est cependant moins bonne)
ArtexELT.png : 512x512 , 207.5Ko ==> 256x256 , 55.6Ko (+ le fond en noir... je sais pas si ça joue)
coque1.png : 1024x1024 , 365.2Ko ==> 512x512 , 145.9Ko (la différence se voit pas sauf sur le text lorsque l'on zoom. Cependant il y a de la place pour refaire les textes en plus grand sur la texture car le centre de la texture du support est inutilisé)
on_off.png : 512x512 , 217.0Ko ==> 256x256 , 45.4Ko (soit une réduction de poids de presque 5 sans perte de qualité)
Bien entendu toutes les textures originale sont resté dans les dossiers en tant que copie.
Je n'ai constaté aucune amélioration des fps. Cette optimisation ne permet que la réduction du poids.
Personnellement je pense qu'il faut garder la texture alt.png en taille 512x512 car en zommant dessus la qualité est moins bonne. Pour les autres la réduction de taille n’impacte pas la qualité je suis donc POUR garder cette réduction. Si vous trouvez que les textes des boutons du Garmin on perdu en qualité, il suffit de les refaire en plus grand : il y a plein de place inutilisé sur la texture
Je serai curieux de voir ce que donne tous les instruments converti avec la technique n°1 de modélisation... Alexis ? Ernest ? ou quelqu'un d'autre
Amicalement,
Clément
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
F-Sig Mar 17 Avr 2012 - 15:53
Euh...rien, j'ai juste critiqué@Ernest : quoi de neuf concernant l'optimisation des détails ?
Je n'ai rien modifié, je n'ai pas beaucoup de temps en ce moment. Les retraités sont toujours à la bourre, c'est bien connu!
Amicalement.
F-Sig- Pilote d'hélico
- Messages : 993
Date d'inscription : 21/09/2010
Age : 76
Localisation : LFIM - LFBT
Instruments, planche de bord
Didier1963 Mer 18 Avr 2012 - 14:25
Désolé de m’immiscer dans ce post,
Est-ce que tu a essayé d'utiliser une planche de bord non trouée
 (donc moins de verticles), sur laquelle tu applique uniquement le cadre de chaque instrument, et la partie de la planche à l’intérieur du cadre te servant de fond pour appliquer ta texture spécifique à l'instrument.
(donc moins de verticles), sur laquelle tu applique uniquement le cadre de chaque instrument, et la partie de la planche à l’intérieur du cadre te servant de fond pour appliquer ta texture spécifique à l'instrument. C'est ce que j'ai prévu de faire pour notre Caravelle 10B-3, vu qu'il y a un paquet d'instruments dont pas mal en double.
PS: je ne sait pas si cela fonctionne vu que je n'en suis qu'a la modélisation 3D, il me reste tout le travail (textures dont une partie est déjà prête de mon projet FSX, ac, fdm, etc.).

Didier1963- Le baron rouge
- Messages : 410
Date d'inscription : 22/02/2012
Age : 60
Localisation : Bourgogne, LFLH
Re: RobinDR-400 jsbSim 120cv
F-Sig Mer 18 Avr 2012 - 18:13
Technique 3 = 8 facettes (9 vertices)F-JJTH a écrit:
Il semble qu'il existe 2 techniques assez différente :
Sur la première technique on voit clairement au le nombre de facettes et de vertices et beaucoup moins important.
Technique 1 = 7 facettes (16 vertices)
Technique 2 = 32 facettes (33 vertices)
F-Sig- Pilote d'hélico
- Messages : 993
Date d'inscription : 21/09/2010
Age : 76
Localisation : LFIM - LFBT

Guillaume- Ingénieur aéronautique
- Messages : 246
Date d'inscription : 21/02/2009
Age : 32
Localisation : Caen – LFRK
Re: RobinDR-400 jsbSim 120cv
F-JJTH Mer 18 Avr 2012 - 22:48
On verra bien si ça paye
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
Alexis Mer 18 Avr 2012 - 23:35
désolé de ne pas être plus présent ces derniers temps.
Pour le fond de l'instru, on peut même mettre un simple carré, Si je ne dis pas de bêtise, les bouts dépasserait derrière le tableau de bord donc invisible
Mais je me dis qu'il y a quelque chose à laquelle nous n'avons pas pensé, la vitre des instru, déjà tout d'abord elle pourrait subir une simplification semblable, ensuite je me demandais si ça n'était pas le transparence qui était responsable de cette chute de fps ? après toute ces expériences accumulées, on se rend compte que d'agir sur les textures ne change pas grand chose, tout comme la 3D, alors pourquoi pas les materials ? la transparence ?
Il faudrait faire le test, virer toutes les vitres des instru et regarder ce que ça donne en fps
Alexis- Admin
- Messages : 2067
Date d'inscription : 19/02/2009
Age : 31
Localisation : Loire Atlantique -
Re: RobinDR-400 jsbSim 120cv
Guillaume Mer 18 Avr 2012 - 23:39
Guillaume- Ingénieur aéronautique
- Messages : 246
Date d'inscription : 21/02/2009
Age : 32
Localisation : Caen – LFRK
Re: RobinDR-400 jsbSim 120cv
F-JJTH Mer 18 Avr 2012 - 23:44
@Alexis : expérience intéressante à faire effectivement. À ton avis si on mets une simple animation de type "select" dans les XML pour faire disparaître les vitres cela suffira ? ou bien il faut carrément supprimer les vitres dans le modèle 3D ?
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
F-JJTH Jeu 19 Avr 2012 - 0:35
Donc à la question << Un objet transparent est-il plus lourd à calculer qu'un objet opaque ? >> la réponse est : <<c'est pareil>>
À la question <<Une vitre avec shader est-elle plus lourde à calculer qu'une vitre sans shader ?>> la réponse est : <<ça peut jouer si il y en a beaucoup>>
À la question << Vaut mieux plusieurs petite texture (1 texture pour chaque fichier AC) ou 1 grosse texture (plusieurs fichiers AC pour 1 texture)>> la réponse est : <<il vaut mieux avoir une grosse texture partagée que beaucoup de petites>>
Cette dernière information est plutôt importante... On pourrait presque remettre en question le système d'organisation des dossiers (1 dossier par instrument qui contient 1XML + 1AC+ 1PNG).
Si on va au bout du résonnement il faudrait plutôt avoir 1 dossier "Instruments" dans lequel on retrouve tous les fichiers AC et XML des instruments et 2 PNG en 2048x2048. Mais dans ce cas : fini le simple "copier/coller" du dossier d'un instrument (dans lequel on a 1XML+1AC+1PNG)
Je crois qu'on se rapproche de la question << Vaut mieux une organisation de dossier attrayante (1 dossier par instrument) ou bien une organisation de dossier à faire fuir mais un tableau de bord moins lourd à charger >>
Personnellement je préfère garder une organisation de dossier attrayante
Si je me pose autant de question concernant l'optimisation ces derniers temps c'est parce que la version Rembrandt ainsi que les diverses améliorations récente de FlightGear montrent clairement que le matériel est mis à rude épreuve et donc que les gens ayant de petite config ne pourront pas en profiter. Alors attention aux phrases du genre << Cette avion on peut l'utiliser avec Rembrandt parce qu'il est pas gourmand, par contre celui-là tu peux pas le lancer avec les dernières améliorations de FG car il est trop gourmand>>
Pour conclure : je pense que l'on est sur la bonne voie et qu'il n'est pas nécessaire de chercher à optimiser le DR plus qu'il ne l'est déjà. Nous avons un avions de très grande qualité, il est donc normal que les FPS en prenne un coup. Mais le résultat est tellement beau que ça le vaut bien
Dernière édition par F-JJTH le Jeu 19 Avr 2012 - 13:02, édité 1 fois
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
JM-26 Jeu 19 Avr 2012 - 10:54
Bien que concerné par ce cas de figure, je suis entièrement d'accord avec toiF-JJTH a écrit:Pour conclure : je pense que l'on est sur la bonne voie et qu'il n'est pas nécessaire de chercher à optimiser le DR plus qu'il ne l'est déjà. Nous avons un avions de très grande qualité, il est donc normal que les FPS en prenne un coup. Mais le résultat est tellement beau que ça le vaut bien
Et comme je l'ai déjà dit à Christian, il est hors de question de faire un retour en arrière, le travail est trop extra et cet avion est tout simplement au top ! De plus tes dernières modifs ont résolu mon problème ...
Tu vois, je souhaite que l'on arrive a la même qualité pour l'AS355, même si je dois avoir des difficultés à l'utiliser !
Amicalemeent,

JM-26- Contrôleur aérien
- Messages : 1911
Date d'inscription : 04/07/2010
Age : 57
Localisation : Anneyron-26 (LFLR)
Re: RobinDR-400 jsbSim 120cv
dany93 Jeu 19 Avr 2012 - 18:28
@Guillaume, et à ceux qui veulent essayer
Traînée du DR400 :
Tu as réuni la traînée "de forme" et la traînée "induite" en une seule courbe dépendant de "alpha" (l'AoA). Or, je pense que l'ancienne séparation était plus judicieuse : en effet, la traînée de forme dépend effectivement essentiellement de alpha et augmente comme la vitesse au carré, alors que la traînée induite dépend surtout de la portance, ne dépend qu'indirectement de alpha, et diminue avec la vitesse (comme le carré de la vitesse d'après ce que je comprends). La somme des deux donne un minimum en fonction de la vitesse qui donne, je suppose, le meilleur rapport de finesse L/D.
En plus, la séparation de ces contributions peut apporter une souplesse pour les réglages.
Je propose donc de revenir à ce principe pour la traînée avec la table de valeurs suivante (inspirée de la tienne pour le minimum avec alpha, mais à valeurs plus faibles puisque la traînée induite est traitée à part):
- Code:
<axis name="DRAG">
<function name="aero/coefficient/CD0">
<description>Drag_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCDge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
<!-- Guillaume ini -->
<!-- -1.5708 2.0000
-0.3491 0.6000
-0.2094 0.2000
-0.1047 0.0600
-0.0524 0.0410
-0.0087 0.0370
0.0175 0.0360
0.0567 0.0370
0.0799 0.0420
0.0960 0.0480
0.1150 0.0600
0.2094 0.1900
0.2793 0.3300
0.3491 0.6000
1.5708 2.0000 -->
<!-- test Dany 17 avril 2012 -->
-1.5708 2.000
-0.3491 0.600
-0.2094 0.0550
-0.1047 0.0462
-0.0524 0.0448
-0.0087 0.0442
0.0175 0.0440
0.0567 0.0444
0.0799 0.0449
0.0960 0.0454
0.1150 0.0468
0.2094 0.0616
0.2793 0.0737
0.3491 0.600
1.5708 2.000
</tableData>
</table>
</product>
</function>
<!-- test Dany 17 avril 2012, with drag due to alpha -->
<function name="aero/coefficient/CDi">
<description>Induced_drag</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/cl-squared</property>
<value>0.04</value>
</product>
</function>
1) Montée env. 600 ft/mn à 140 -145 km/h,
2) Descente à 135 km/h :
- Plein réduit : -725 ft/mn au chrono (-800 ft/mn lu vario...), ce qui donne au chrono une finesse de 10.2
- Hélice arrêtée : -682 ft/mn au chrono (-750 vario), ce qui donne au chrono une finesse de 10.8.
D'après le manuel de vol DR 400-120 (Ed. 10, Sept. 1992, p. 5.05) la finesse de 10 est "moteur coupé" (hélice arrêtée). On peut donc augmenter encore un peu la traînée, mais c'est du fignolage.
3) Les virages à forte inclinaison (60°) sont un peu plus faciles mais toujours très limites (55 - 60° à 140 - 150 km/h, avec un AoA de 12 à 13° proche du décrochage). Un peu plus de traction dans ces conditions pour avoir 170 km/h apporterait la réserve manquante. En espérant que ça ne jouera pas trop sur la vitesse de montée qui est proche des spécifs (d'ap. manuel : 3.23 m/s = 635 ft/mn à 145 km/h).
Si tu peux me dire ce que tu en penses et, surtout, m'expliquer pourquoi si tu n'es pas d'accord. Ceci pour éviter de jouer au ping-pong.
Amicalement,
Dany
dany93- pilote de vieux coucous
- Messages : 345
Date d'inscription : 23/02/2012
Age : 77
Localisation : Région parisienne - LFPE
Re: RobinDR-400 jsbSim 120cv
Guillaume Ven 20 Avr 2012 - 0:01
Guillaume- Ingénieur aéronautique
- Messages : 246
Date d'inscription : 21/02/2009
Age : 32
Localisation : Caen – LFRK
Re: RobinDR-400 jsbSim 120cv
OO ZVY Ven 20 Avr 2012 - 11:40

OO ZVY- pilote de vieux coucous
- Messages : 336
Date d'inscription : 02/08/2011
Age : 56
Re: RobinDR-400 jsbSim 120cv
dany93 Ven 20 Avr 2012 - 13:24
Dany
dany93- pilote de vieux coucous
- Messages : 345
Date d'inscription : 23/02/2012
Age : 77
Localisation : Région parisienne - LFPE
Re: RobinDR-400 jsbSim 120cv
dany93 Dim 22 Avr 2012 - 17:53
J'ai réglé ces deux paramètres de manière à obtenir une meilleure finesse de 10 à la vitesse de 135 km/h (qui se dégrade comme il se doit au-dessus et en-dessous de cette vitesse).
Ceci donne les valeurs ci-dessous pour la partie "DRAG" du FDM :
- Code:
<axis name="DRAG">
<function name="aero/coefficient/CD0">
<description>Drag_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCDge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
<!-- under test Dany 17 - 21 avril 2012 -->
-1.5708 1.600
-0.3491 0.480
-0.2094 0.040
-0.1047 0.034
-0.0524 0.033
-0.0087 0.032
0.0175 0.032
0.0567 0.032
0.0799 0.033
0.0960 0.033
0.1150 0.034
0.2094 0.045
0.2793 0.054
0.3491 0.480
1.5708 1.600
</tableData>
</table>
</product>
</function>
<!-- under test Dany 21 avril 2012, with drag due to alpha -->
<function name="aero/coefficient/CDi">
<description>Induced_drag</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/cl-squared</property>
<value>0.075</value>
</product>
</function>
Cependant, parmi toutes les combinaisons que j'ai balayées, je n'en ai pas rencontré qui permettent de tenir les virages inclinés à 60°. Il y a peut-être une légère amélioration, mais tout au plus arrive-t-on à 50 - 55° en maintenant l'altitude.
Ceci m'a amené à une réflexion sur la puissance nécessaire pour tenir les virages inclinés à 60°.
J'ai fait des calculs "à la louche" partant des modèles théoriques basiques que j'ai trouvés sur Internet avec :
- une finesse de 10 à la vitesse de 135 km/h, pour laquelle on a Traînée totale = CD0 + CDi = 0.1 x Poids et CD0 = CDi (meilleure finesse) ==> CD0 = CDi = 0.1 x Poids / 2 en palier,
- une variation de la "traînée de forme" CD0 en (Vitesse au carré), augmentée de 10% en virage 60° pour tenir compte de l'augmentation d'angle d'attaque à double charge (il passe de 5.8° à 135 km/h en palier à 8 - 10° en virage serré, ce qui augmente CD0 de 10 à 20 %),
- une variation de la "traînée induite" CDi en (portance au carré) / (V au carré).
J'en suis arrivé à la conclusion que, même avec seulement 2 personnes à bord et le plein (env. 1780 lb), il faudrait environ 105 ch de traction pour tenir 150 km/h incliné à 60°. Ceci est incompatible avec la puissance moteur maxi de 118 ch et avec un rendement d'hélice de 80%, d'autant plus que ce meilleur rendement n'est obtenu qu'aux vitesses les plus élévées (225 km/h gaz à fond en sur-régime 3000 RPM). Je ne sais pas si on peut gagner un peu de traction en optimisant le rendement hélice à une vitesse un peu plus basse (cad en diminuant le pas de l'hélice), mais je ne pense pas que cela puisse être suffisant.
C'est la première fois que je fais ces calculs et je peux me tromper.... Qu'en pensez-vous, Guillaume, JM ? (je peux détailler mes calculs pour un envoi par mail, mais il faut que je les rédige).
Guillaume semblant d'accord sur le principe, pensez-vous qu'on puisse inclure ce modèle de traînée (Forme + Induite) à la place de son précédent dans le FDM "en cours" ?
Dany
dany93- pilote de vieux coucous
- Messages : 345
Date d'inscription : 23/02/2012
Age : 77
Localisation : Région parisienne - LFPE
Re: RobinDR-400 jsbSim 120cv
aco Dim 22 Avr 2012 - 18:34
En ce qui concerne ce virage, prévu par le constructeur, rien ne dit qu'il soit possible à la masse max. Guillaume pourrait nous renseigner sur ce point mais il me semble que, puisqu'il s'agit d'instruction, deux personnes à bord et une quantité de carburant ajustée seraient plus réalistes.
Il n'en reste pas moins vrai qu'il faut encore gratter au moins 200 t/mn pour atteindre les specs...
JM

aco- Nettoyeur de verrières
- Messages : 33
Date d'inscription : 05/03/2012
Age : 83
Localisation : Gers
Re: RobinDR-400 jsbSim 120cv
F-JJTH Dim 22 Avr 2012 - 20:19
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
dany93 Dim 22 Avr 2012 - 21:17
- Code:
<?xml version="1.0" encoding="UTF-8"?>
<!-- ########################################
# DR400-jsbSim by PAF team
# April 2012 : Modified by PAF team
# http://equipe-flightgear.forumactif.com
##########################################-->
<?xml-stylesheet type="text/xsl" href="http://jsbsim.sourceforge.net/JSBSim.xsl"?>
<fdm_config name="DR400-120" version="2.0" release="ALPHA"
xmlns:xsi="http://www.w3.org/2001/XMLSchema-instance"
xsi:noNamespaceSchemaLocation="http://jsbsim.sourceforge.net/JSBSim.xsd">
<fileheader>
<author>Daniel Dubreuil, Guillaume Chauvat</author>
<filecreationdate> 2007-05-01 </filecreationdate>
<version> 2012-03-11 </version>
<description> Robin DR400-120 </description>
</fileheader>
<metrics>
<wingarea unit="M2"> 13.60 </wingarea>
<wingspan unit="M" > 8.72 </wingspan>
<wing_incidence> 2.00 </wing_incidence>
<chord unit="M" > 1.56 </chord> <!-- 1.71 m for the center part -->
<htailarea unit="M2"> 2.88 </htailarea>
<htailarm unit="M" > 3.75 </htailarm>
<vtailarea unit="M2"> 1.63 </vtailarea>
<vtailarm unit="M" > 3.95 </vtailarm>
<location name="AERORP" unit="M">
<x> -1.33 </x>
<y> 0.00 </y>
<z> 0.00 </z>
</location>
<location name="EYEPOINT" unit="M">
<x> -1.31 </x>
<y> -0.28 </y>
<z> 0.55 </z>
</location>
<location name="VRP" unit="M">
<x> 0 </x> <!-- was 180 in -->
<y> 0 </y>
<z> 0 </z> <!-- was 12 in -->
</location>
</metrics>
<mass_balance>
<ixx unit="KG*M2"> 2500 </ixx> <!-- TODO: calculate a correct value -->
<iyy unit="KG*M2"> 2800 </iyy>
<izz unit="KG*M2"> 4000 </izz>
<ixy unit="KG*M2"> 0 </ixy>
<ixz unit="KG*M2"> 0 </ixz>
<iyz unit="KG*M2"> 0 </iyz>
<emptywt unit="KG" > 585 </emptywt>
<location name="CG" unit="M">
<x> -1.40 </x> <!-- 0.37 from leading edge -->
<y> 0.00 </y>
<z> -0.18 </z>
</location>
<pointmass name="PILOT" >
<weight unit="KG">75</weight>
<location name="POINTMASS" unit="M">
<x> -1.36 </x>
<y> -0.28 </y>
<z> 0.05 </z>
</location>
</pointmass>
<pointmass name="COPILOT">
<weight unit="KG">70</weight>
<location name="POINTMASS" unit="M">
<x> -1.36 </x>
<y> 0.28 </y>
<z> 0.05 </z>
</location>
</pointmass>
<pointmass name="LEFT_PASSENGER">
<weight unit="KG">0</weight>
<location name="POINTMASS" unit="M">
<x> -0.58 </x>
<y> -0.28 </y>
<z> 0.05 </z>
</location>
</pointmass>
<pointmass name="RIGHT_PASSENGER">
<weight unit="KG">0</weight>
<location name="POINTMASS" unit="M">
<x> -0.58 </x>
<y> 0.28 </y>
<z> 0.05 </z>
</location>
</pointmass>
<pointmass name="LUGGAGE">
<weight unit="KG">5</weight>
<location name="POINTMASS" unit="M">
<x> 0.13 </x>
<y> 0.00 </y>
<z> 0.10 </z>
</location>
</pointmass>
</mass_balance>
<ground_reactions>
<contact type="BOGEY" name="NOSE">
<location unit="M">
<x> -2.57 </x>
<y> 0.00 </y>
<z> -1.11 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="N/M"> 40000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 13000 </damping_coeff>
<max_steer unit="DEG"> 20.00 </max_steer>
<brake_group>NONE</brake_group>
<retractable>FIXED</retractable>
</contact>
<contact type="BOGEY" name="LEFT_MAIN">
<location unit="M">
<x> -1.02 </x>
<y> -1.24 </y>
<z> -1.11 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="N/M"> 65000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 24000 </damping_coeff>
<max_steer unit="DEG">0</max_steer>
<brake_group>LEFT</brake_group>
<retractable>FIXED</retractable>
</contact>
<contact type="BOGEY" name="RIGHT_MAIN">
<location unit="M">
<x> -1.02 </x>
<y> 1.24 </y>
<z> -1.11 </z>
</location>
<static_friction> 0.80 </static_friction>
<dynamic_friction> 0.50 </dynamic_friction>
<rolling_friction> 0.02 </rolling_friction>
<spring_coeff unit="N/M"> 65000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 24000 </damping_coeff>
<max_steer unit="DEG">0</max_steer>
<brake_group>RIGHT</brake_group>
<retractable>FIXED</retractable>
</contact>
<contact type="STRUCTURE" name="TAIL">
<location unit="M">
<x> 2.82 </x>
<y> 0.00 </y>
<z> -0.24 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<spring_coeff unit="N/M"> 190000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 15000 </damping_coeff>
</contact>
<contact type="STRUCTURE" name="LEFT_WING">
<location unit="M">
<x> -1.20 </x>
<y> -4.35 </y>
<z> 0.00 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<spring_coeff unit="N/M"> 190000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 15000 </damping_coeff>
</contact>
<contact type="STRUCTURE" name="RIGHT_WING">
<location unit="M">
<x> -1.20 </x>
<y> 4.35 </y>
<z> 0.00 </z>
</location>
<static_friction> 0.2 </static_friction>
<dynamic_friction> 0.2 </dynamic_friction>
<spring_coeff unit="N/M"> 190000 </spring_coeff>
<damping_coeff unit="N/M/SEC"> 15000 </damping_coeff>
</contact>
</ground_reactions>
<propulsion>
<engine file="Lycoming_O-235-L2A">
<location unit="M">
<x> -2.60 </x>
<y> 0.00 </y>
<z> 0.00 </z>
</location>
<orient unit="DEG">
<pitch> 0.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
<feed>0</feed>
<thruster file="prop72_CK_S6-0-56">
<location unit="IN">
<x> -3.15 </x>
<y> 0.00 </y>
<z> 0.00 </z>
</location>
<orient unit="DEG">
<pitch> 0.00 </pitch>
<roll> 0.00 </roll>
<yaw> 0.00 </yaw>
</orient>
</thruster>
</engine>
<tank type="FUEL" number="0">
<location unit="M">
<x> -0.65 </x> <!-- 1.12 from leading edge -->
<y> 0.00 </y>
<z> -0.35 </z>
</location>
<capacity unit="KG"> 78.59 </capacity> <!-- 109 L available on 110 L total-->
<type>AVGAS</type> <!-- 0.721 kg/L -->
</tank>
</propulsion>
<flight_control name="FCS: DR400-120">
<channel name="Pitch">
<summer name="Pitch Trim Sum">
<input>fcs/elevator-cmd-norm</input>
<input>fcs/pitch-trim-cmd-norm</input>
<clipto>
<min> -1 </min>
<max> 1 </max>
</clipto>
</summer>
<aerosurface_scale name="Elevator Control">
<input>fcs/pitch-trim-sum</input>
<range>
<min> -0.35 </min>
<max> 0.30 </max>
</range>
<output>fcs/elevator-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Roll">
<summer name="Roll Trim Sum">
<input>fcs/aileron-cmd-norm</input>
<input>fcs/roll-trim-cmd-norm</input>
<clipto>
<min> -1 </min>
<max> 1 </max>
</clipto>
</summer>
<aerosurface_scale name="Left Aileron Control">
<input>fcs/roll-trim-sum</input>
<range>
<min> -0.35 </min>
<max> 0.35 </max>
</range>
<output>fcs/left-aileron-pos-rad</output>
</aerosurface_scale>
<aerosurface_scale name="Right Aileron Control">
<input>fcs/roll-trim-sum</input>
<range>
<min> -0.35 </min>
<max> 0.35 </max>
</range>
<output>fcs/right-aileron-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Yaw">
<summer name="Rudder Command Sum">
<input>fcs/rudder-cmd-norm</input>
<input>fcs/yaw-trim-cmd-norm</input>
<limit>
<min> -0.35 </min>
<max> 0.35 </max>
</limit>
</summer>
<aerosurface_scale name="Rudder Control">
<input>fcs/rudder-command-sum</input>
<range>
<min> -0.35 </min>
<max> 0.35 </max>
</range>
<output>fcs/rudder-pos-rad</output>
</aerosurface_scale>
</channel>
<channel name="Flaps">
<kinematic name="Flaps Control">
<input>fcs/flap-cmd-norm</input>
<traverse>
<setting>
<position> 0 </position>
<time> 0 </time>
</setting>
<setting>
<position> 0.25 </position>
<time> 1.5 </time>
</setting>
<setting>
<position> 1 </position>
<time> 3 </time>
</setting>
</traverse>
<output>fcs/flap-pos-norm</output>
</kinematic>
<aerosurface_scale name="Flap Position degree">
<input>fcs/flap-pos-norm</input>
<range>
<min>0</min>
<max>60</max>
</range>
<output>fcs/flap-pos-deg</output>
</aerosurface_scale>
</channel>
<channel name="Landing Gear">
</channel>
<channel name="Speedbrake">
<kinematic name="Speedbrake Control">
<input>fcs/speedbrake-cmd-norm</input>
<traverse>
<setting>
<position> 0 </position>
<time> 0 </time>
</setting>
<setting>
<position> 1 </position>
<time> 1 </time>
</setting>
</traverse>
<output>fcs/speedbrake-pos-norm</output>
</kinematic>
</channel>
</flight_control>
<aerodynamics>
<function name="aero/function/kCDge">
<description>Change_in_drag_due_to_ground_effect</description>
<product>
<table>
<independentVar>aero/h_b-mac-ft</independentVar>
<tableData>
0.0000 0.0480
0.1000 0.5150
0.1500 0.6290
0.2000 0.7090
0.3000 0.8150
0.4000 0.8820
0.5000 0.9280
0.6000 0.9620
0.7000 0.9880
0.8000 1.0000
0.9000 1.0000
1.0000 1.0000
1.1000 1.0000
</tableData>
</table>
</product>
</function>
<function name="aero/function/kCLge">
<description>Change_in_lift_due_to_ground_effect</description>
<product>
<table>
<independentVar>aero/h_b-mac-ft</independentVar>
<tableData>
0.0000 1.2030
0.1000 1.1270
0.1500 1.0900
0.2000 1.0730
0.3000 1.0460
0.4000 1.0550
0.5000 1.0190
0.6000 1.0130
0.7000 1.0080
0.8000 1.0060
0.9000 1.0030
1.0000 1.0020
1.1000 1.0000
</tableData>
</table>
</product>
</function>
<axis name="LIFT">
<function name="aero/coefficient/CLalpha">
<description>Lift_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCLge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<independentVar lookup="column">fcs/flap-pos-deg</independentVar>
<tableData>
0 15 60
-0.349 -0.538 -0.538 -0.538
-0.314 -0.566 -0.628 -0.720
-0.288 -0.627 -0.684 -0.768
-0.279 -1.129 -0.985 -0.768
-0.271 -1.156 -1.001 -0.768
-0.244 -1.084 -0.900 -0.624
-0.209 -1.004 -0.775 -0.432
0.000 0.090 0.403 0.768
0.070 0.484 0.806 1.200
0.175 1.075 1.382 1.872
0.244 1.406 1.661 2.043
0.262 1.459 1.696 2.052
0.279 1.498 1.718 1.980
0.305 1.522 1.739 1.600
0.314 1.485 1.692 1.350
0.332 1.280 1.400 1.200
0.349 1.020 1.150 1.100
0.419 0.768 0.900 1.000
0.611 0.576 0.700 0.850
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/dCLsb">
<description>Delta_Lift_due_to_speedbrake</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/speedbrake-pos-norm</property>
<value>0</value>
</product>
</function>
<function name="aero/coefficient/CLde">
<description>Lift_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sh-sqft</property>
<property>fcs/elevator-pos-rad</property>
<value>0.2</value>
</product>
</function>
</axis>
<axis name="DRAG">
<function name="aero/coefficient/CD0">
<description>Drag_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/function/kCDge</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
<!-- under test Dany 17 - 21 avril 2012 -->
-1.5708 1.600
-0.3491 0.480
-0.2094 0.040
-0.1047 0.034
-0.0524 0.033
-0.0087 0.032
0.0175 0.032
0.0567 0.032
0.0799 0.033
0.0960 0.033
0.1150 0.034
0.2094 0.045
0.2793 0.054
0.3491 0.480
1.5708 1.600
</tableData>
</table>
</product>
</function>
<!-- under test Dany 21 avril 2012, with drag due to alpha -->
<function name="aero/coefficient/CDi">
<description>Induced_drag</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/cl-squared</property>
<value>0.075</value>
</product>
</function>
<function name="aero/coefficient/CDmach">
<description>Drag_due_to_mach</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.00 0.000
0.65 0.000
1.10 0.023
1.80 0.015
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/CDflap">
<description>Drag_due_to_flaps</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/flap-pos-deg</property>
<property>aero/function/kCDge</property>
<value> 0.00060 </value>
</product>
</function>
<!-- <function name="aero/coefficient/CDsb">
<description>Drag_due_to_speedbrakes</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>fcs/speedbrake-pos-norm</property>
<value>0.028</value>
</product>
</function> -->
<function name="aero/coefficient/CDbeta">
<description>Drag_due_to_sideslip</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<table>
<independentVar lookup="row">aero/beta-rad</independentVar>
<tableData>
-1.57 0.8
-0.26 0.040
0.00 0.000
0.26 0.040
1.57 0.8
</tableData>
</table>
<value>0.3</value>
</product>
</function>
<function name="aero/coefficient/CDde">
<description>Drag_due_to_Elevator_Deflection</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sh-sqft</property>
<abs><property>fcs/elevator-pos-norm</property></abs>
<value>0.04</value>
</product>
</function>
</axis>
<axis name="SIDE">
<function name="aero/coefficient/CYb">
<description>Side_force_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>aero/beta-rad</property>
<value>-0.3</value>
</product>
</function>
</axis>
<axis name="ROLL">
<function name="aero/coefficient/Clb">
<description>Roll_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<value>-0.025</value>
<!-- Asymmetric stall -->
<table>
<independentVar lookup="row">aero/alpha-deg</independentVar>
<tableData>
-15 1
13 1
14 5
35 5
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Clp">
<description>Roll_moment_due_to_roll_rate (roll damping)</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/p-aero-rad_sec</property>
<value>-1</value>
</product>
</function>
<function name="aero/coefficient/Clr">
<description>Roll_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>0.08</value>
<!-- Asymmetric stall -->
<table>
<independentVar lookup="row">aero/alpha-deg</independentVar>
<independentVar lookup="column">velocities/r-aero-rad_sec</independentVar>
<tableData>
-0.15 -0.1 0 0.1 0.15
-15 1 1 1 1 1
13 1 1 1 1 1
14 50 20 1 20 50
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Clda">
<description>Roll_moment_due_to_aileron</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.0 0.185
0.7 0.185
2.0 0.057
</tableData>
</table>
<!-- less efficient ailerons when Asymmetric stall -->
<table>
<independentVar lookup="row">aero/alpha-deg</independentVar>
<tableData>
-15 1
14 1
15 0.3
35 -0.1
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cldr">
<description>Roll_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<value>0.01</value>
</product>
</function>
</axis>
<axis name="PITCH">
<function name="aero/coefficient/Cmo">
<description>Pitching_moment_at_zero_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<value>0.1300</value>
</product>
</function>
<function name="aero/coefficient/Cmalpha">
<description>Pitch_moment_due_to_alpha</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<table>
<independentVar lookup="row">aero/alpha-rad</independentVar>
<tableData>
-0.400 0.55
-0.305 0.58
-0.285 0.58
0.285 -0.58
0.305 -0.58
0.400 -0.55
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cmde">
<description>Pitch_moment_due_to_elevator</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>fcs/elevator-pos-rad</property>
<table>
<independentVar lookup="row">velocities/mach</independentVar>
<tableData>
0.0 -1.120
0.7 -1.120
2.0 -0.275
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cmflap">
<description>Pitch_moment_due_to_flaps</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<table>
<independentVar lookup="row">fcs/flap-pos-deg</independentVar>
<tableData>
0 0
15 -0.060
60 -0.120
</tableData>
</table>
</product>
</function>
<function name="aero/coefficient/Cmq">
<description>Pitch_moment_due_to_pitch_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>velocities/q-aero-rad_sec</property>
<value>-12</value>
</product>
</function>
<function name="aero/coefficient/Cmadot">
<description>Pitch_moment_due_to_alpha_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/cbarw-ft</property>
<property>aero/ci2vel</property>
<property>aero/alphadot-rad_sec</property>
<value>-7</value>
</product>
</function>
</axis>
<axis name="YAW">
<function name="aero/coefficient/Cnb">
<description>Yaw_moment_due_to_beta</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/beta-rad</property>
<value>0.05</value> <!-- ini 0.01 -->
</product>
</function>
<function name="aero/coefficient/Cnr">
<description>Yaw_moment_due_to_yaw_rate</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>aero/bi2vel</property>
<property>velocities/r-aero-rad_sec</property>
<value>-0.15</value>
</product>
</function>
<function name="aero/coefficient/Cndr">
<description>Yaw_moment_due_to_rudder</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/rudder-pos-rad</property>
<value>-0.06</value>
</product>
</function>
<function name="aero/coefficient/Cnda">
<description>Adverse_yaw</description>
<product>
<property>aero/qbar-psf</property>
<property>metrics/Sw-sqft</property>
<property>metrics/bw-ft</property>
<property>fcs/left-aileron-pos-rad</property>
<value>-0.01</value>
</product>
</function>
</axis>
</aerodynamics>
<system file="shadow-tweak"/>
<system file="crash-detect"/>
</fdm_config>
dany93- pilote de vieux coucous
- Messages : 345
Date d'inscription : 23/02/2012
Age : 77
Localisation : Région parisienne - LFPE
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
Re: RobinDR-400 jsbSim 120cv
F-JJTH Jeu 26 Avr 2012 - 22:06
PS: Pour cette version "tout DDS" pense à mettre à jour ton GIT avec celui de la PAF
Merci d'avance !
F-JJTH- Pilote de Ligne
- Messages : 2010
Date d'inscription : 19/01/2011
Age : 35
Localisation : Carpentras - LFNH -
ADMIRABLE
Yzarth Sam 28 Avr 2012 - 11:57
Après avoir lu les 35 pages de posts je suis admiratif de votre travail (avant même d'avoir pour décoller avec la Bête).
Je m'en vais télécharger le nouveau DR-400 de ce pas
merci et à bientôt dans les cieux de FG.

Yzarth- Nettoyeur de verrières
- Messages : 37
Date d'inscription : 04/10/2011
Age : 45
Localisation : LFRK -
Re: RobinDR-400 jsbSim 120cv
Guillaume Dim 29 Avr 2012 - 14:09
Je vais refaire des photos cet après-midi pour le Cap 10. Faut-il aussi autre chose pour le DR400? J'ai noté le mécanisme de fermeture de la verrière (avec des vues d'ensemble).
Guillaume- Ingénieur aéronautique
- Messages : 246
Date d'inscription : 21/02/2009
Age : 32
Localisation : Caen – LFRK
Page 21 sur 33 • 1 ... 12 ... 20, 21, 22 ... 27 ... 33
» Développement de la Caravelle SE-210
» Debat sur Jsbsim avec Yasim
» Robin DR400 jsbSim 180ch
» Création d'un avion sur FlightGear avec JSBSim
|
|
|